Hola, soy Natxo Varona. Ingeniero con más de 36 años de experiencia en robótica autónoma y
tecnologías de la información, con un foco especial en el diseño y desarrollo de sistemas robóticos
completos, desde la arquitectura y el hardware hasta el software de alto nivel y la operación en
entornos reales.
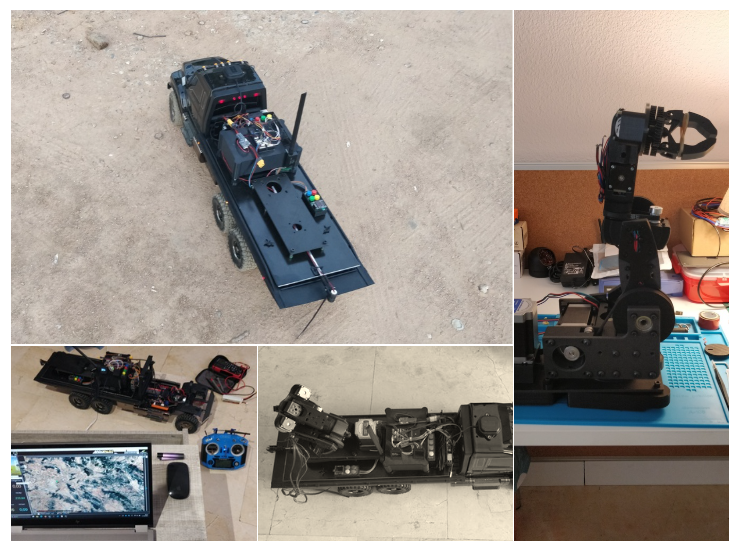
En los últimos años he centrado mi trabajo en robótica autónoma avanzada,
desarrollando robots móviles, AGV y plataformas cuadrúpedas, basados en ROS2, con capacidades de
navegación, mapping, gestión de mapas, planificación de rutas y ejecución de misiones complejas. Mi
experiencia abarca tanto entornos industriales y agrícolas como sanitarios, siempre con un enfoque
práctico, robusto y orientado a la fiabilidad del sistema.
He liderado y participado en equipos
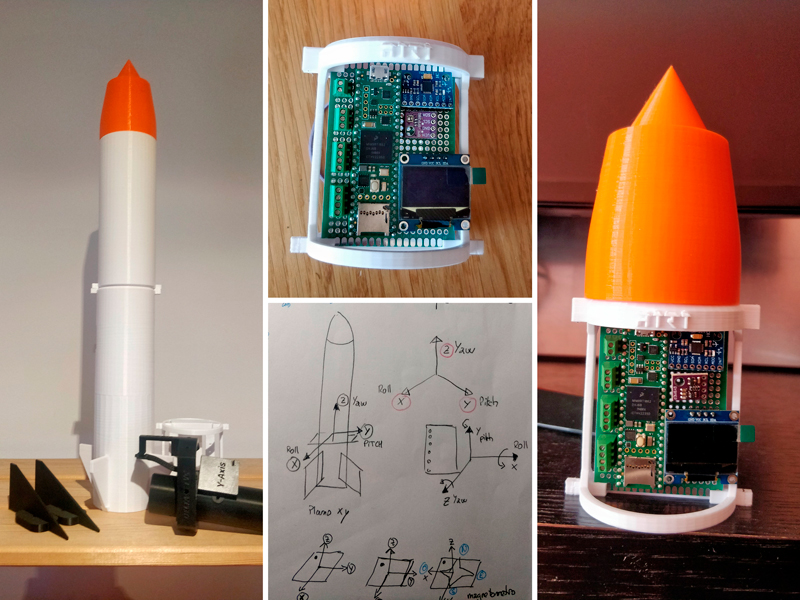
de I+D, definiendo arquitecturas técnicas, integrando electrónica, sensores, sistemas RTK,
comunicaciones e IoT, y desarrollando software en Python, C/C++, Rust y sistemas embebidos, aplicando
buenas prácticas de ingeniería, CI/CD y metodologías ágiles como SCRUM y XP.
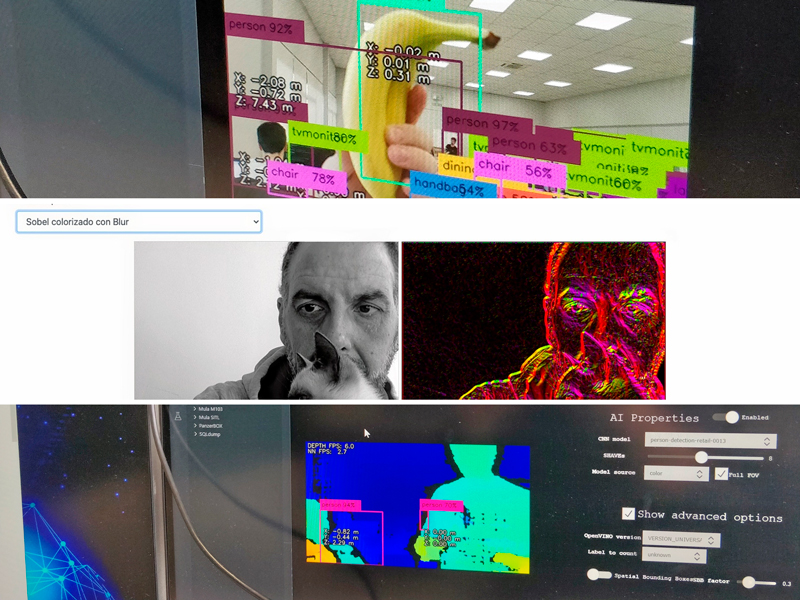
Cuento con una
sólida base en machine learning, bases de datos SQL y NoSQL, sistemas GIS, diseño electrónico y de PCB,
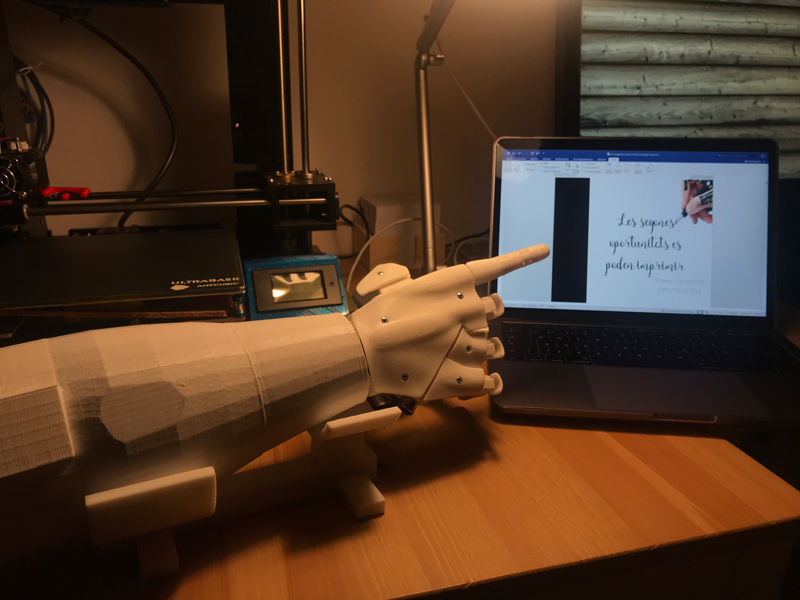
microcontroladores y FPGA, así como experiencia práctica con drones, Linux y fabricación digital
mediante impresión 3D y corte láser.
Me define una mentalidad curiosa, resolutiva y orientada a
la innovación, con especial interés en proyectos donde la robótica pasa del laboratorio al mundo real.
Estoy abierto a nuevos retos y relocalización internacional, con el objetivo de transformar ideas
complejas en soluciones tecnológicas funcionales y de alto impacto.





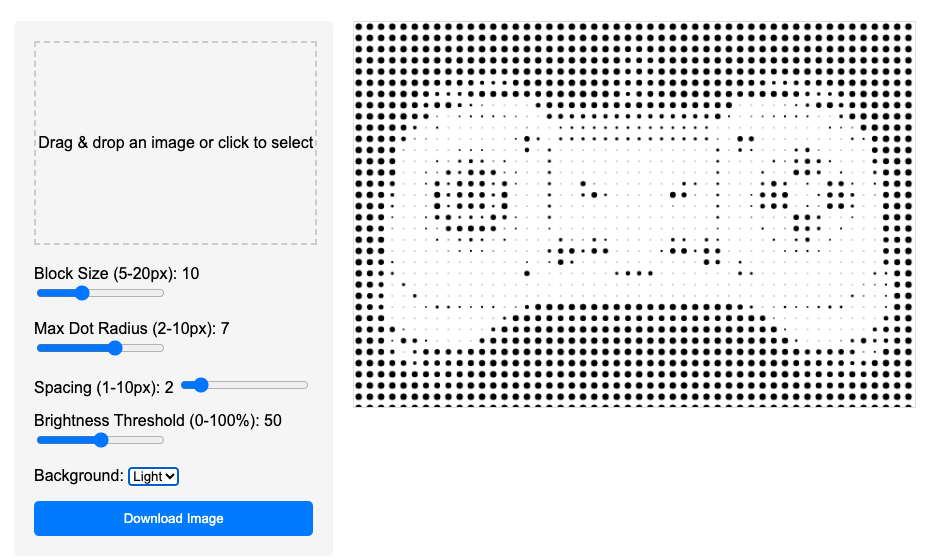
Convierte imágenes en un patrón halftone de puntos, introduce una imagen y transforma en una versión de puntos parametrizados.
Ver Proyecto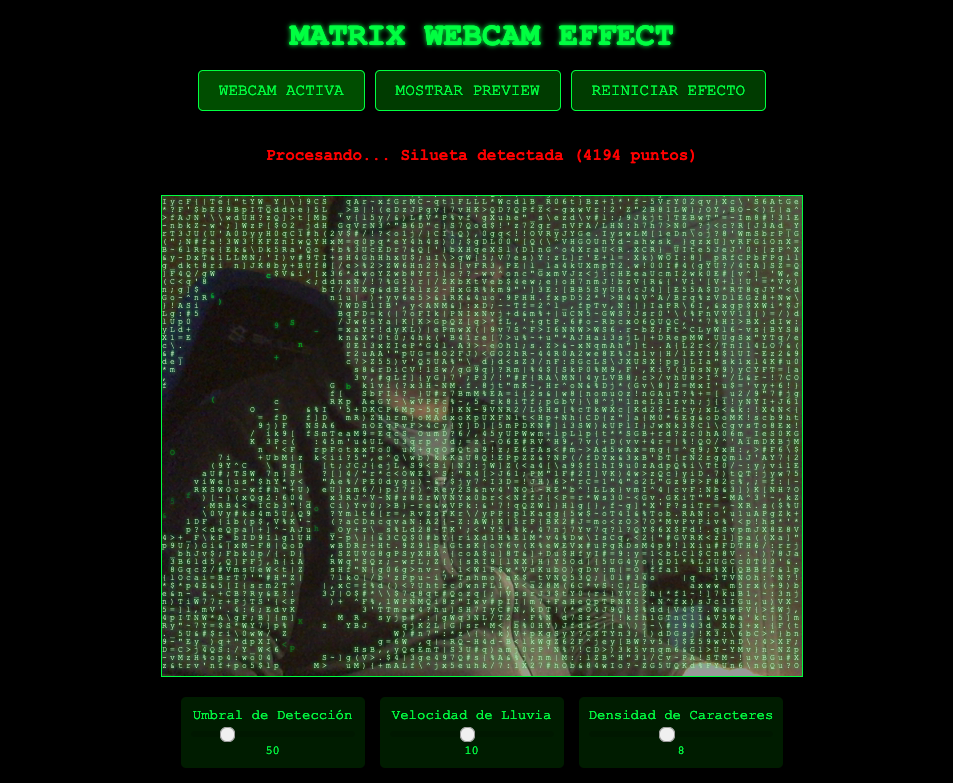
Simulador de un efecto Matrix de la imagenes recibidas desde tu webcam, parametrización de efectos.
Ver Proyecto
In-Progress - Implementación de una nueva solucion de robot para ayuda humanitaria internacional.
Ver Proyecto
